| CBS-70 PTOLEMAIOS |
ガンダムOO(ダブルオー)のファーストシーズンに登場した、ソレスタルビーイングのガンダム輸送母艦プトレマイオス。 バンダイからスナップキットで登場していました。サイズ的にあまり無理せずに出来そうだったため、誰かが作るのではないかと思いつつ一向に登場しないので、またまた作ってみました。 自分的には第2シーズンのプトレマイオスの方が好きなんだけど・・・、大気圏航行用の展開翼があると水中機動が安定するし・・・てか、バンダイさん作ってくれないかなぁ。(´Д`;) |
||
| モデル仕様 |
CBS-70 PTOLEMAIOS モデル情報 |
||
| ガンダム系もやってみよう |
|
|
プトレマイオス 船体サイズ的に灯油ポンプ2基か、バスポンプを利用する方法も考えましたが、水流を2つに振り分けるなら最初からツインポンプの方が効率がよいと言うことと、バッテリの容量の問題で1モーターで使用したかった為に、AMMメンバーのJ.AMANOさんから遠心ポンプの作りかたを教えていただき、1モーターで2ポンプという効率のよい方式を実践して搭載しました。 |

| 水の抵抗が大きい・・・ |
|
|
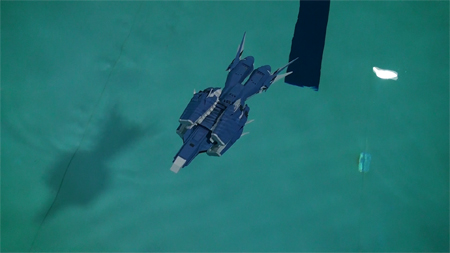
予想していたこととはいえ、やはりコンテナ部分がかなりの抵抗になります。 ですが、推力不足は水中機動の自由度を下げてしまうので、今のパワーで足りなければ何か方法を考えねばなりません。 これはもう少しテストを重ねる必要がありそうです。 |
| ノズルレイアウト |
|
|
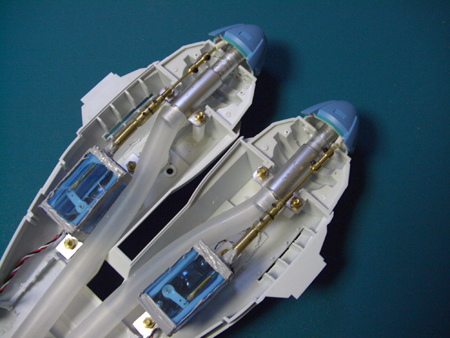
推進はポンプからの水流噴射で推力を得ています。いわゆるウォータージェット推進です。 2つのノズルに2つのサーボモータを配しこの2つのサーボですべての制御を行います。船体中央部にモーターと遠心ポンプユニットを搭載し、噴射ノズルまではシリコンチューブでつないでいます。 サーボはいつものように水密ケースに入れたタイプの物で、リンケージロッドは真鍮パイプとOリングを組み合わせグリスを注入して防水をしたものですが、サーボ側のOリングを2重にした強化タイプの物にしてみました。 ですがこれに関してはあまり効果が実感できていません。というよりも明らかな失敗・・・。2個のOリングの間にグリスが埋まり密着しすぎて固まってしまいます。2週間もほっぽっておくと少し手で動かしてあげないとくっついて動かなくなります。 |
| 逆Vテール |
|
|
噴射ノズルは2つで、2つのサーボを使用しています。これは、飛行機のようなVテールミキシングをハの字型セットして姿勢方向制御を行っています。噴射口のノズルに十字の整流板を追加してあり、水流の方向をより効率的に変えるようになっています。 これはJ-AMANOさんが作ったサンダーバード4号のメカを参考に組み込んで作ってみました。以前NX-01の時にノズルの方向制御に2つのノズルに3つのサーボを使用したことを考えると、2つのノズル制御だけで3次元機動を制御出来る効率の良い方式だと思います。 ノズル自体は左側が左斜め上から右斜め下に、右側が右斜め上から左斜め下に動きます。上昇では逆ハの字型に水流が起こり下降ではハの字型に水流が起こります。左右の組み合わせ制御で旋回も可能になります。公開中の動画の冒頭シーンでノズルの動きを見せています。2サーボで2ノズルですが、ミキシングによって上下左右自由に方向を変える事が出来ます。 これは、いわゆるプロポのVテールミキシングを使っています。Vテールミキシングの動きの解説は雲山さんのウェブサイト、BlueWorldの中で解説されていたような気が・・・・・・(他力本願(´Д`;)) |
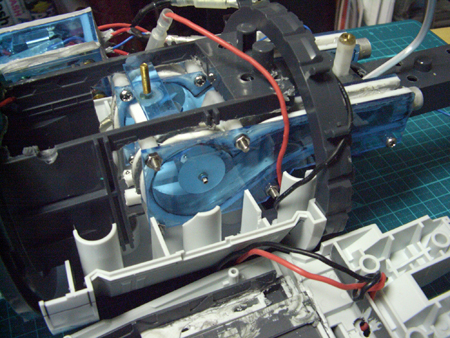
| 遠心ポンプ |
|
|
船体中央部に配置しているのが遠心ポンプ。 透明アクリル板で外壁を作っているので内部構造がよくわかると思います。左右に2基の遠心ポンプがあります。ポンプの間に280モーターがありミニ四駆のギアを流用してモーター一つで2基のポンプを駆動しています。 外壁を透明にすることで内部の動きが見えるようにしてみましたが・・・インペラが回っているところがわかるだけで、特に何がわかるという物でもありません。なんかもう少し目に見える変化があったら面白いのに・・・ |
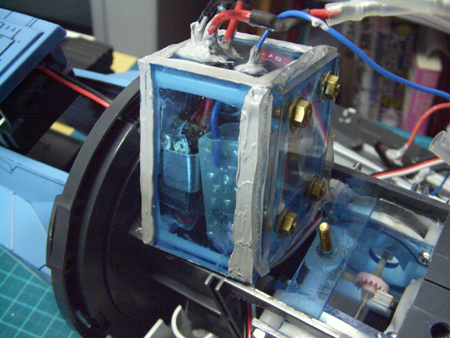
| メカボックス |
|
|
内部には受信機とアンプ、そしてアンテナブースターが入っています。 アンテナブースターを入れるために最初のテスト後にメカボックス自体を一回り大きく作り直しました。このボックスはアクリル板をベースに使用しています。プラ版よりアクリル板の方が耐久性が高いため、私のメカボックスはすべてアクリル板を使用しています。 フタは4個のナットで止まっていて、防水にはゲルパッキンを使用しています。ゲルパッキンは私の防水の要です。この柔らかさの密着性は一度使うとやみつきです。
|
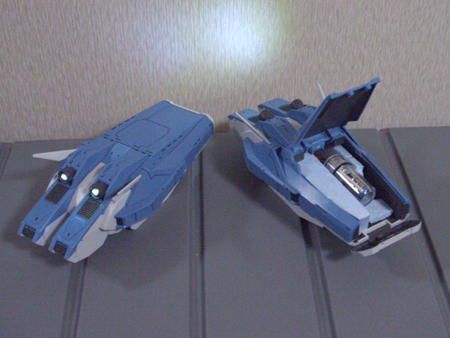
| カタパルトゲート |
|
|
カタパルトの部分は元の機構を残して開閉が可能になってます。 |

| 電飾 |
|
|
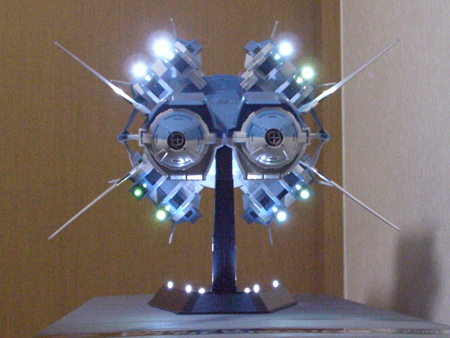
船体の電飾はカタパルトデッキ内部とコンテナの噴射口。下2つのコンテナには走行用のバッテリーが内蔵してあり取り外せなくなっています。下の2つのコンテナのLED電源は走行用バッテリーから取っています。 展示用の台にも7個のLEDを仕込みました。単4電池3本使用で長時間点灯が可能になっています。こういう展示台ってどうしても電飾付けたくなってしまいます。 |

| コンテナ |
|
|
上2つのコンテナはメンテ時に取り外さないと船体が分解できないため、LED電源はLR44ボタン電池3個を搭載して本体から切り離しても光るようにしました。 上部コンテナの内部は浮力材とボタン電池のケースが入っています。この電池ケースは市販の円筒形の小型パーツケースにOリングで防水にしたものを使用しています。 ほんのり薄緑色に光っているのはクリアカラーの青と黄色を混ぜてクリアグリーンを作ってLEDに直接塗っています。 |
| テスト走行 |
|
|
|
最近、いきなり水に入れた状態でも、そこそこ走るように作れるようになりました。これは進歩ですよ。 |
||

|
|
|
R/C STARSHIP - CBS-70 PTOLEMAIOS プトレマイオス SFYDD PV-10 HD版 |
||