


前置きとしてこのモデルの注意点を説明しておきます。このモデルをきれいに仕上げるには相応の労力が必要になり、走行モデルにするにはギミックとのトレードオフになります。ライナーやホーク、ジュニアの格納庫など、面白い707のギミックですが、走行モデルにするには走行中に破損、パーツの紛失の危険が大きくなるからあきらめた方がよいでしょう。
そもそも、2013年現在、自動浮沈式の潜水艦モデルは童友社のUボートとイ号400ぐらいしかありません。というより走らせて遊べるモデルはそれとゴム動力式の一部しかないのが現状です。昔は銭湯などに持ち込んで遊んだり、池などでも遊びましたが、そもそも現代ではそう言う場所自体少なくなってきていて公園の池なども多くはないのが現状です。
そう言う中、モデル販売は風前の灯火ではあるのですが、一部の愛好家などに支えられて童友社のU-ボートとイ号400という自動浮沈モデルが今でも残っているのが唯一の救いではあります。
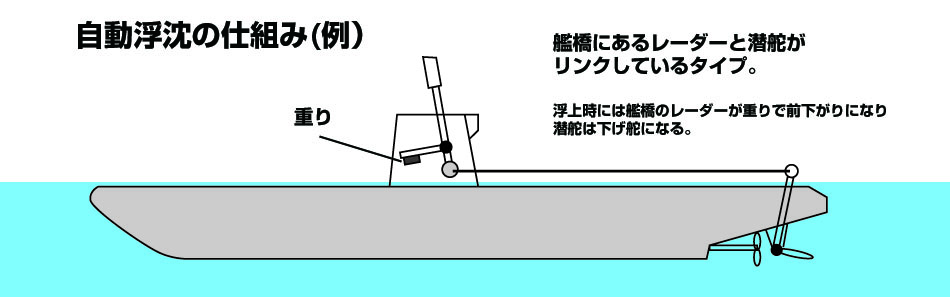
さて、自動浮沈式と言えばレーダー方式が主流でした。(**艦橋にあるレーダーが水に潜ると水の抵抗でレーダーが押され、そのリンケージが潜舵を動かし浮沈するという仕組みです。)下の図はその浮沈行程の仕組みを解説したものです。

このメカは艦橋部のセイルプレーンと後部スクリュー前の潜舵がリンクしていて、上記のレーダー式と同じように見えますが、その方式は少々異なります。
ではこの707のメカの動作説明と作動原理を解説していきます。


セイルプレーンが水の中にはいると水圧によって上に跳ね上げられます。この時跳ね上げるためにはセイルプレーン自体をやや上向きにして羽の下側に水が当たるようにしなければなりません。
リンクを貼って組み付けてみるとちょうどそう言う感じになるのが解ります。ここで見た目的には水平に合わせたくなりますが、ここのメカの基本はこの跳ね上げなのできちんと設計図通りになっているか確認しながら作業します。

このメカは先に説明したレーダー式の自動浮沈のレーダー部がセイルプレーンになっています。レーダー式にすればセイルプレーンを固定化できるのですが、そうすると707の特徴であるシュノーケルを付けられなくなるのでこういったメカにする必要があったのかもしれません。
しかし、このセイルプレーン式にはもう一つの機能があったのです。以下はこの自動浮沈についての追加補足説明をしていきます。

さて、今までの説明が一つの基本ですが、タスクフォースのモデルには省略されているパーツがあります右の写真の青○部のセイルプレーンの調整ネジです。私もこの存在自体あまり深くは考えていませんでした。私の場合、組み立て時に取り付けスペースがあるのにパーツが省略されているのでミニ四駆のネジがあったので組み付けていました。ただそれだけの動機ではありました。
実際このネジによりセイルプレーンの跳ね上げ角度に変化が出て、リンケージで動く後部潜舵もその角度が変化します。この調整ネジの設計時の調整幅はわかりませんが、後ろの潜舵を上げ舵から水平、そしてほんの少し下げ舵になる幅でネジを追加しました。
走行させながら調整して潜って浮かび上がってくる間隔をいい感じと思える位置に調整しました。すると、後ろの潜舵が上げ舵ではなくほぼ水平位置になったのです。
SFYDD水物外伝
サブマリン707 タスクフォース
自動浮沈プラモを走らせてみた。
2013-6-16日撮影

実験してみて解ったのは後部の潜舵が上げ舵にならなくても自動浮沈すると言うことです。
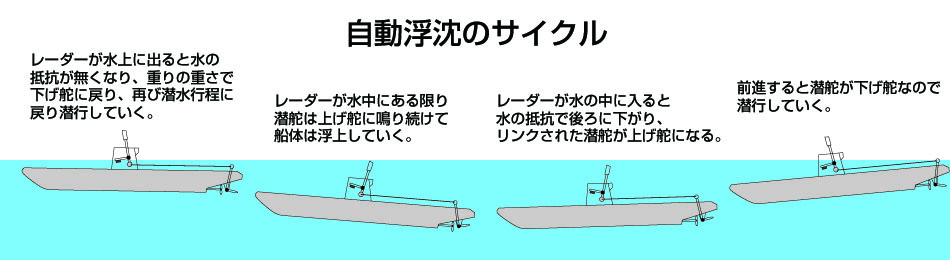
ということで、このサイクルを再度説明しましょう。
1.スクリューによる推力で前進します。
2.セイルプレーンと船体後尾の潜舵がリンケージによって連結され連動して動きます。
初期段階ではセイルプレーンはやや上反角があり、潜舵は下げ舵となっています。
この状態で前進すると下げ舵により後ろが上がろうとすることで逆に頭が下がりダウントリムが発生します。
3.さらにこの状態で推力がかかるのでダウントリムのまま潜行していきます。
セイルが水の中にはいるとセイルプレーンが水の抵抗で押し上げられ潜舵は水平状態に戻ります。
これが潜行していくときの行程です。

セイルプレーンが上向きになり潜舵としての機能も果たすのですが、それより重要なのはここの位置とこのセイ
ルプレーンが水の抵抗になっていると言うことです。
下の図のように、セイルプレーンには水の抵抗がかかり、減速しようする力がかかります。ですが、推力はその
ままですので船体は前に進もうとします。その力のバランスの差で、セイルプレーンを中心に振り子のような動
作がおこります。すると船体がダウントリムからアップトリムへと変化して浮上していきます。
これが浮上していくときの行程です。しかも後ろの潜舵は水平ですし、前の固定翼はやや下げ舵になっています。
つまりこの状態で浮上してくるのはセイルプレーンが作る効果なのです。

映像でわかるとおり、後ろの潜舵は上げ舵にならなくても浮上していきます。固定前舵もやや下げ舵です。
レーダー式が潜舵を動かして、それにより潜舵を動かしてトリムを変化させる様に機能するのに対して、この707方式では、セイルプレーンを中心にトリム変化を生み出しているという全くの別物の設計になっているようです。もしこれを狙って設計されたとするなら凄い事です。
調整ネジの追加と水中映像から思っても見なかったことがわかりました。
姿勢変化(ダウントリム)を作るのはセイルが水上に出て、舵が下がる一瞬です。

そして、前の固定潜舵にも大きな役目があります。
姿勢変化を作るのはセイルが水上に出て舵が下がる一瞬です。この時、一気にダウントリムになるのですが、前の固定潜舵はその状態を維持するために必要と言うことなのです。
-- つまりそうしないとそのまま潜っていかない。 --
ということで、この本来の設定にはない前の潜舵にも大きな役目があるのです。
ちなみにこの潜舵はほんの少し下げ舵になっています。推測するにその方が潜り出しはスムースになるのではないかと考えます。
後方の潜舵の角度は最初はかなりの下げ舵でスタートします。そうして一瞬にしてダウントリムを作るのですが、
これも多分そうせざるを得ないのでしょう。潜舵の角度が浅いと緩やかに潜るようになり、セイルが水没する前
にアップトリムへと移行が始まります。つまり、艦橋が潜ったと思ったらすぐ浮上してしまうでしょう。
レーダー式はレーダーの長さ分下がり完全に艦橋は水没してから浮上します。つまりこの707のメカのセイルプ
レーンの位置では最初に多めに潜らなければ潜水艦らしい深度で走行できないのでしょう。ですから一瞬でぐい
っと潜らせるのだと思います。このあたりも設計に折り込み済みなのでしょう。
一気にぐいっと潜り、なだらかに浮上させる、これが多分このメカの本当の味付けなんだと思います。この全体
の構成からそうせざるを得なかったのかも知れませんが・・・。
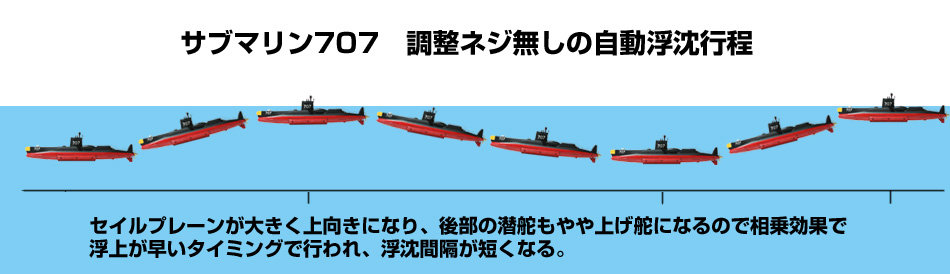
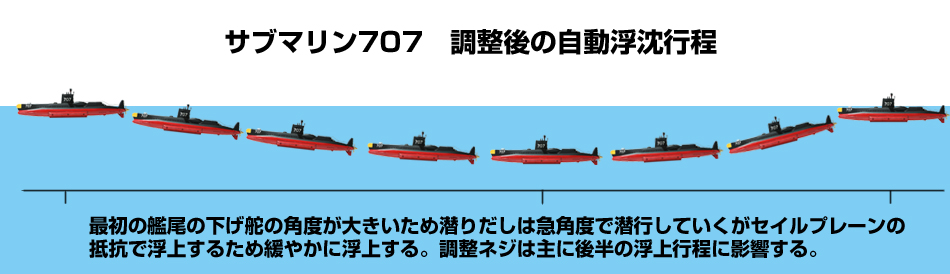
これがこの707の自動浮沈の仕組みです。わかりやすく調整前と調整後の行程をイラストにしてみました。

映像解析というのは本当に役に立ちます。実際の動きを見るとどう動くかというのがわかります。
レーダー式自動浮沈というのもいい方法ですけど、この707の自動浮沈の設計者は全く別のアプローチで作りたかったのではないでしょうか。
セイルに設定にはない自動浮沈用の大きなレーダーを作りたくなかったのか、実際の所はどうしてこういう設計にしたかはわかりませんが、何れにしろ、普通思いつかないような方法で自動浮沈させるこの設計者に敬意を表します。
水の抵抗(前進時の水圧)でセイルプレーンを跳ね上げるという、このメカは非常に面白いです。
このセイルにある自動浮沈の調整ネジを使って調整してなければ、この設計には気がつかなかったでしょう。後ろの潜舵を上げ舵まで動かせば確実に浮上してくるので安全ではありますが、浮沈間隔を見ていると、どうも後ろの潜舵は水平ぐらいまでで自動浮沈させるつもりの設計をしたんではないかと思えてなりません。
そのぐらいが見ていて潜水艦らしいいい動きをしている気がします。
もう一つの追記ですが、この事象の裏付けに2つの事例があります。その一つは、この設計には速度が大きく影響していると言うことです。
一つはこのモデルの撮影時のことで、マンガン単2電池を買いに行くのがめんどくさいという理由で、スペーサーと単3電池を使い、鉛重りをスペーサーに仕込んで重量を調整したら、さすがアルカリ単3、パワーがありすぎて速度が速すぎてどんどん沈んでいってしまったのです。
セイルプレーンに上反角があるので、長い距離を走るうちに徐々に上がってはきましたが、抵抗になるはずのセイルプレーンが抵抗しきれず、自動浮沈として機能しなかったと言うことです。
こういう場合のために潜舵を上げ舵にしていると考えるには当時のモーターとバッテリーのパワーは非力すぎるので、やはり設計時には潜舵が上げ舵にならなくても自動浮沈するようにと考えていたと思われます。
解説映像の撮影時には5分以上手で押さえた状態でペラを回しバッテリーを弱らせてから走行させました。つまり、速度に関しても設計に入っていると言うことです。



もう一つの事例はこの自動浮沈メカを搭載した2chラジコンの動作です。ミニッツレーサーのメカを組み込んだので操作は前進後進と左右旋回のみ。速度をあげると潜り、スピード調整で水深維持、速度を遅くすると浮上してくるという形になっていました。
もちろんセイルプレーンの跳ね上げ角度や後ろの潜舵の可動角度は自動浮沈より少なくなるようにしていました。そうしないと速い速度でしか深度維持が出来なくなるからです。
当時は深く考えずに遊んでいましたが、レーダー式自動浮沈機構を残して自動浮沈のUボートを2chラジコン化したら水中の深度維持は不可能になります。
奇しくもそう言う事例の積み重ねが、このメカを考えるきっかけになりました。よく考えるとこの自動浮沈メカはかなり希有なメカだと言えるでしょう。今なら3Chでラジコン化出来る自信もありますが、他に作りたい物が終わってからということになるでしょう。
最後に、このモデルを作る上で重要な2つの要素があります。
一つ目としては、自動浮沈浮沈させるには潜舵同士のリンケージがとにかく軽く動いて引っかからないようにする必要があります。自動浮沈にこれは必須事項です。
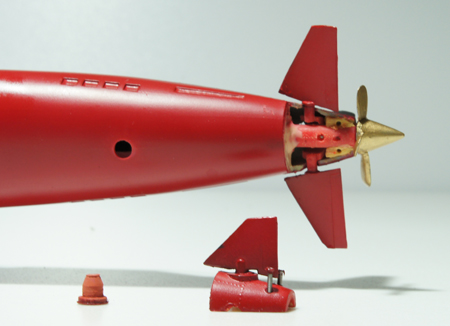
二つ目は、モーター部には必ず浸水するのであらかじめ水抜き穴を作っておきます。走行後は必ず水を出して乾燥させます。そうするとモーター寿命を延ばせます。右の写真は私の707ですが、モーター部は必ず浸水するので水抜き穴を作り。ゴムキャップで塞いでいます。走行後はキャップを外して水を出して十分乾燥させます。作例として童友社のUボートの水抜きゴムを流用しましたが、別の方法でも大丈夫です。
ラダーパーツも取り外せるようにしてスクリューシャフトにグリスアップ出来るようにしました。このおかげで、何年も使えるようになりました。

この撮影に使ったモデルは製作後に一度調整走行させました。水を抜いて乾燥させて、今回7年後にふたたび走行させています。きちんと水を抜いて乾燥させておけば大丈夫です。
このサブマリン707は、メカ的にも貴重なモデルです。製作しようとキットの箱を開けてパーツを眺めると相当気合いが入っているときでないと作る勇気が出てきません。ですが、だからこそ挑戦しがいのあるモデルですし、きちんと自動浮沈した時は感動します。
もしこの貴重なモデルを入手したならば是非挑戦してください。この映像にあるように、ちゃんと作ればきちんと自動浮沈してくれます。多分これほど挑戦しがいがあるプラモデルもそう無いのではないかと思いますよ。
--2013年6月 STARFLEET YOKOSUKA DRY DOCKS--